Prof. Zhou has published papers in prestigious robotics journals and conferences, including TRO, TASE, RAL, RSS,
ICRA, and IROS. His team's work has been recognized with the IEEE Transactions on Robotics Best Paper
Award (first for an Asian institution), the IEEE RAL Best Paper Award, and was a finalist for the IEEE ICRA Best Paper Award on
Unmanned Aerial Vehicles. His publications have been listed as popular papers in TRO and RAL, with the
highest ranking of No. 1. He serves as an Associate Editor of IEEE TRO and is listed in Stanford's World's
Top 2% Scientists.
Our research focuses on mobile robot planning and perception
that enable robust and agile autonomous operation in unknown
complex environments. Detailed research information can be found
in the following news,
publications,
projects,
recent talks, and
our
videos.
Join us: We welcome applications for PhD, Master's, and visiting student positions at SUSTech. Students interested in the HKUST-GZ Red Bird MPhil or PhD programs are also encouraged to get in touch.
You can contact us via email: zhouby@sustech.edu.cn
There are a few spots remaining for PhD/Master admission in Fall 2027.
If the situation is suitable, we can arrange further discussions. Generally, you will receive a reply within two weeks. If you don't receive a response, feel free to send a follow-up email. If there is still no response, it may indicate that the fit is not ideal, and we apologize that we are unable to respond to every inquiry.
A paper is accepted by IEEE Transactions on Robotics (T-RO 2026)
June, 2026
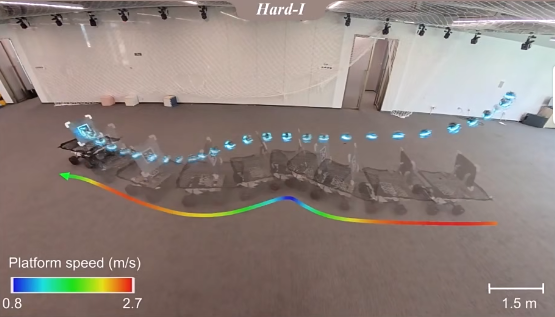
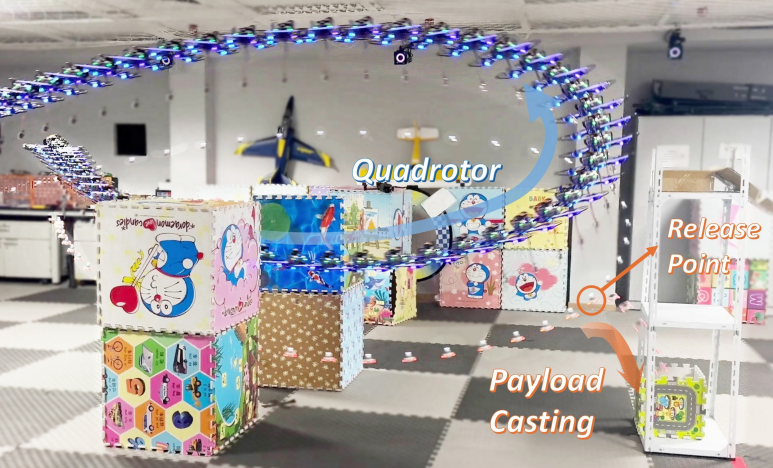
Haojia Li, Yang Xu, Chen Feng, Boyu Zhou#, Shaojie Shen’s work on AD-Planner: Adaptive In-flight Delivery Using a Quadrotor with a Suspended Payload is accepted by the IEEE Transactions on Robotics (T-RO) for publication.
Three papers are accepted by IROS 2026
June, 2026
- Xinlu Yan*, Mingjie Zhang*, Yuhao Fang, Yanke Sun, Jun Ma, Youmin Gong, Boyu Zhou#, Jie Mei# — C2-Explorer: Contiguity-Driven Task Allocation with Connectivity-Aware Task Representation for Decentralized Multi-UAV Exploration
- Guowei Shi*, Xupeng Xie, Yiming Luo, Jian Guo, Jun Ma, Boyu Zhou# — LAGO Policy: Latency-Aware Asynchronous Diffusion Policies with Goal-Directed Collision-Free Planning for Smooth Manipulation
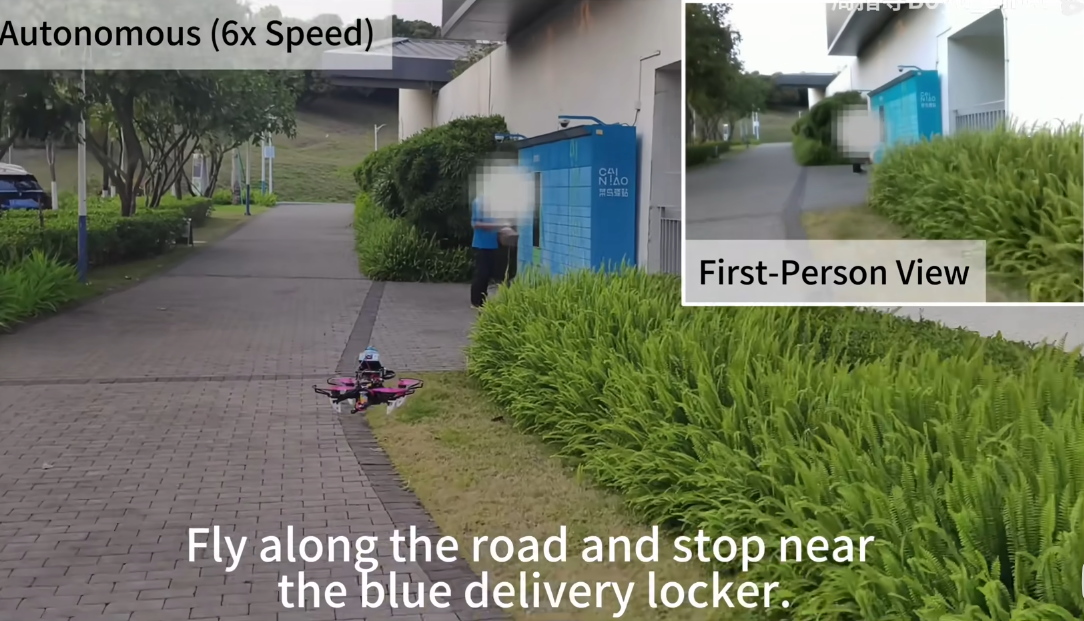
- Guiyong Zheng, Yueting Ban, Mingjie Zhang, Juepeng Zheng, Boyu Zhou# — OnFly: Onboard Zero-Shot Aerial Vision-Language Navigation toward Safety and Efficiency
Accepted by the 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
A paper is accepted by ICRA 2026
March, 2026
Zijun Che, Yinghong Zhang, Shengyi Liang, Boyu Zhou, Jun Ma, Jinni Zhou’s work on GUIDE: A Diffusion-Based Autonomous Robot Exploration Framework Using Global Graph Inference is accepted by the 2026 IEEE International Conference on Robotics and Automation (ICRA) for publication.
A paper is accepted by IEEE Transactions on Automation Science and Engineering (TASE 2025)
November, 2025
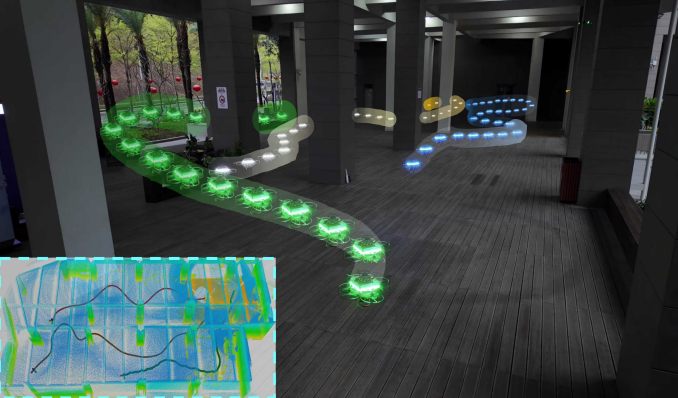
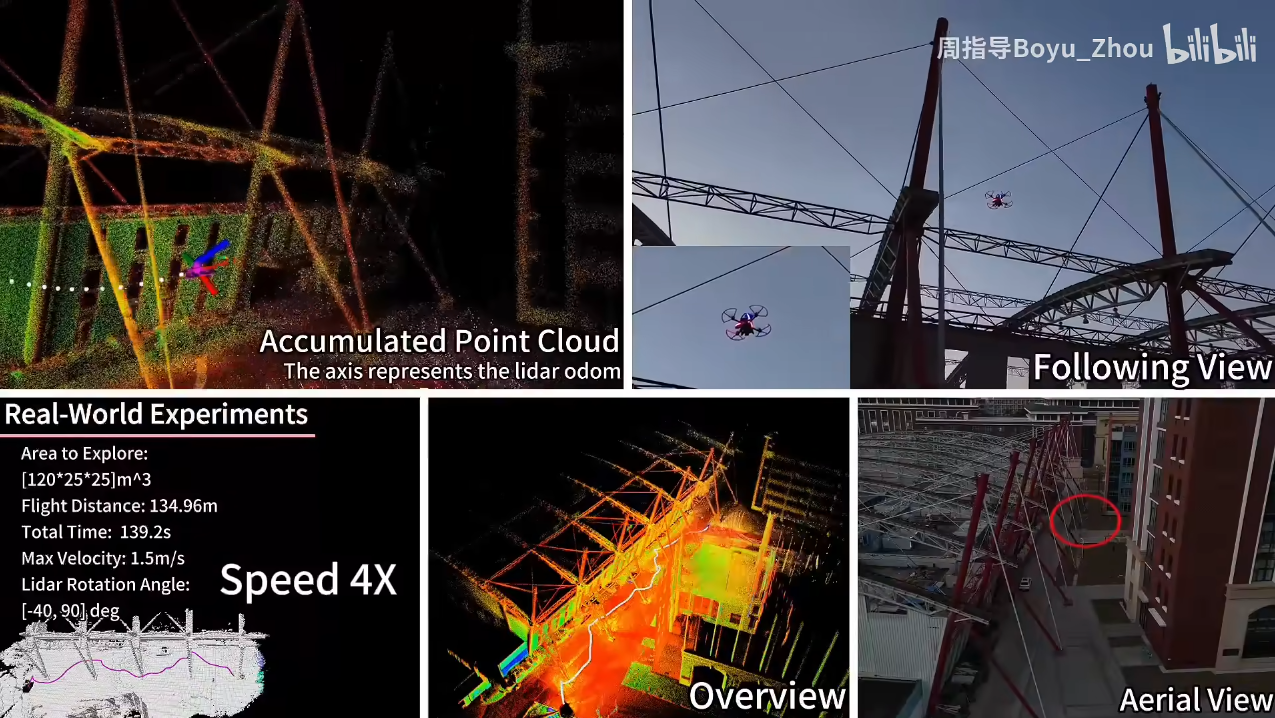
Zhiwen Zhu*, Yuhao Fang*, Xulin Xiao, Ximin Lv, Jie Mei, Boyu Zhou#'s work on FLARE: Fast Autonomous Aerial Exploration in Large-Scale 3D Scenarios using Actively Rotated LiDAR is accepted by the IEEE Transactions on Automation Science and Engineering (TASE) for publication.
Three papers are accepted by IEEE Robotics and Automation Letters (RA-L 2025)
September, 2025
- Mingjie Zhang, Yuheng Du, Chengkai Wu, Jinni Zhou, Zhenchao Qi, Jun Ma, Boyu Zhou# — ApexNav: An Adaptive Exploration Strategy for Zero-Shot Object Navigation with Target-centric Semantic Fusion
- Chunxin Zheng, Yulin Li, Zhiyuan Song, Zhihai Bi, Jinni Zhou, Boyu Zhou, Jun Ma — Local Reactive Control for Mobile Manipulators With Whole-Body Safety in Complex Environments
- Shuang Geng*, Zelin Ning*, Fu Zhang, Boyu Zhou# — EPIC: A Lightweight LiDAR-Based UAV Exploration Framework for Large-Scale Scenarios
Accepted by the IEEE Robotics and Automation Letters (RA-L) for publication.
A paper is accepted by IEEE Robotics & Automation Magazine (2025)
July, 2025
Muqing Cao, Thien-Minh Nguyen, Shenghai Yuan, Andreas Anastasiou, Angelos Zacharia, Savvas Papaioannou, Panayiotis Kolios, Christos G Panayiotou, Marios M Polycarpou, Xinhang Xu, Mingjie Zhang, Fei Gao, Boyu Zhou, Ben M Chen, Lihua Xie’s work on Cooperative Aerial Robot Inspection Challenge: A Benchmark for Heterogeneous Multi-Uncrewed-Aerial-Vehicle Planning and Lessons Learned is accepted by the IEEE Robotics & Automation Magazine for publication.
Three papers are accepted by IROS 2025
June, 2025
- Chenxin Yu*, Zihong Lu*, Jie Mei, Boyu Zhou# — Perception-aware Planning for Quadcopter Flight in Unknown and Feature-limited Environments
- Tingbang Liang*, Yixin Zeng*, Jiatong Xie, Boyu Zhou# — DynamicPose: Real-time and Robust 6D Object Pose Tracking for Fast-Moving Cameras and Objects
- Xupeng Xie, Ruoyu Geng, Jun Ma, Boyu Zhou# — AKF-LIO: LiDAR Inertial Odometry with Gaussian Map by Adaptive Kalman Filter
Accepted by the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
A paper is accepted by Robotics: Science and Systems (RSS 2025)
June, 2025
Yiming Luo, Yunfei Wang, Hongming Chen, Chengkai Wu, Ximin Lyu, Jinni Zhou, Jun Ma, Fu Zhang, Boyu Zhou#'s work on FERMI: Flexible Radio Mapping with a Hybrid Propagation Model and Scalable Autonomous Data Collection is accepted by Robotics: Science and Systems (RSS) for publication.
A paper is accepted by IEEE Transactions on Robotics (T-RO 2025)
Jan, 2025
Yichen Zhang, Xinyi Chen, Chen Feng, Boyu Zhou#, Shaojie Shen’s work on FALCON: Fast Autonomous Aerial Exploration using Coverage Path Guidance is accepted by the IEEE Transactions on Robotics (T-RO) for publication.
A paper is accepted by IROS 2024
October, 2024
Mingjie Zhang*, Chen Feng*, Zengzhi Li, Guiyong Zheng, Yiming Luo, Zhu Wang, Jinni Zhou, Shaojie Shen, Boyu Zhou#'s work on SOAR: Simultaneous Exploration and Photographing with Heterogeneous UAVs for Fast Autonomous Reconstruction is accepted by the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) for publication.
A paper is accepted by IEEE Robotics and Automation Letters (RA-L 2024)
July, 2024
Chenxing Jiang, Yiming Luo, Boyu Zhou#, Shaojie Shen’s work on H3-Mapping: Quasi-Heterogeneous Feature Grids for Real-time Dense Mapping Using Hierarchical Hybrid Representation is accepted by the IEEE Robotics and Automation Letters (RA-L) for publication.
A paper is accepted by IEEE Transactions on Robotics (T-RO 2024)
March, 2024
Haokun Wang, Haojia Li, Boyu Zhou#, Fei Gao#, Shaojie Shen’s work on Impact-Aware Planning and Control for Aerial Robots with Suspended Payloads is accepted by the IEEE Transactions on Robotics (T-RO) for publication.
A paper is selected for the IEEE RA-L Best Paper Award
May 4th, 2024
Chenxing Jiang*, Hanwen Zhang*, Peize Liu, Zehuan Yu, Hui Cheng, Boyu Zhou, Shaojie Shen’s paper H2-Mapping: Real-time Dense Mapping Using Hierarchical Hybrid Representation has been selected for the 2024 IEEE Robotics and Automation Letters (RA-L) Best Paper Award!!
A paper is selected as the finalist for the IEEE ICRA Best Paper Award on Unmanned Aerial Vehicles
April 5th, 2024
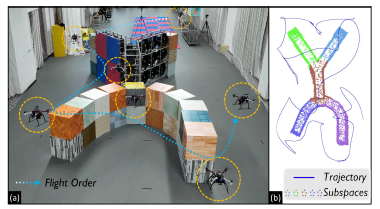
Chen Feng, Haojia Li, Mingjie Zhang, Xinyi Chen, Shaojie Shen, and Boyu Zhou’s paper FC-Planner: A Skeleton-guided Planning Framework for Fast Aerial Coverage of Complex 3D Scenes has been selected as the finalist for the 2024 IEEE International Conference on Robotics and Automation (ICRA) Best Paper Award on Unmanned Aerial Vehicles!!
A paper is selected for the IEEE T-RO Best Paper Award
April 4th, 2024
Boyu Zhou, Hao Xu and Shaojie Shen’s paper RACER: rapid collaborative exploration with a decentralized multi-UAV system has been selected for the 2024 IEEE Transactions on Robotics (T-RO) King-Sun Fu Memorial Best Paper Award!!
A paper is accepted by RA-L
Febuary 29th, 2024
Yiming Luo, Zixuan Zhuang, Neng Pan, Chen Feng, Shaojie Shen, Fei Gao, Hui Cheng and Boyu Zhou’s work on Star-searcher: a complete and efficient aerial system for autonomous target search in complex unknown environments is accepted by the IEEE Robotics and Automation Letters (RA-L) for publication.
Three papers are accepted by ICRA 2024
January 29th, 2024
Three conference papers are accepted by the 2024 IEEE International Conference on Robotics and Automation (ICRA 2024), including:
- Xinyi Chen, Yichen Zhang, Shaojie Shen and Boyu Zhou. APACE: Agile and Perception-aware Trajectory Generation for Quadrotor Flights.
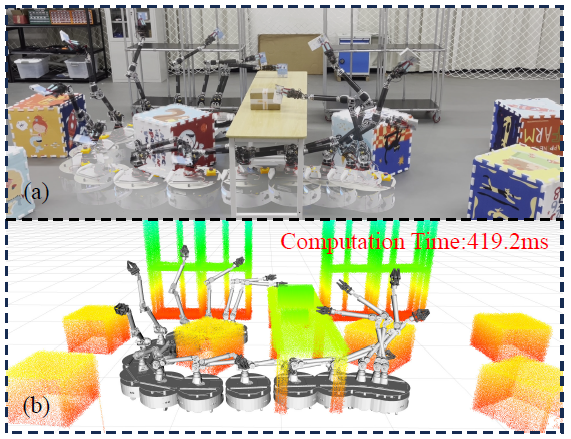
- Chengkai Wu, Ruilin Wang, Mianzhi Song, Fei Gao, Jie Mei, Boyu Zhou. Real-time Whole-body Motion Planning for Mobile Manipulators Using Environment-adaptive Search and Spatial-temporal Optimization.
- Chen Feng, Haojia Li, Jinqi, Jiang, Xinyi Chen, Shaojie Shen, and Boyu Zhou. FC-Planner: A Skeleton-guided Planning Framework for Fast Aerial Coverage of Complex 3D Scenes.
Three papers are accepted by RA-L and will be presented at ICRA 2024
August 22nd, 2023
Chenxing Jiang, Hanwen Zhang, Peize LIU, Zehuan Yu, Hui Cheng, Boyu Zhou and Shaojie Shen’s work on H2-mapping: real-time dense mapping using hierarchical hybrid representation is accepted by the IEEE Robotics and Automation Letters (RA-L) for publication.
A paper is accepted by RA-L
August 9th, 2023
Haojia Li, Haokun Wang, Chen Feng, Fei Gao, Boyu Zhou and Shaojie Shen’s work on Autotrans: a complete planning and control framework for autonomous UAV payload transportation is accepted by the IEEE Robotics and Automation Letters (RA-L) for publication.
A paper is accepted by RA-L
2023
Chen Feng, Hangning Zhou, Huadong Lin, Zhigang Zhang, Ziyao Xu, Chi Zhang, Boyu Zhou and Shaojie Shen’s work on Macformer: map-agent coupled transformer for real-time and robust trajectory prediction is accepted by the IEEE Robotics and Automation Letters (RA-L) for publication.